As part of the Svalbard field campaign, we tested and validated our live update framework and communication setup for autonomous, intelligent sensors operating in Arctic conditions.
🧠 𝐋𝐢𝐯𝐞 𝐍𝐞𝐮𝐫𝐚𝐥 𝐍𝐞𝐭𝐰𝐨𝐫𝐤 𝐔𝐩𝐝𝐚𝐭𝐞
A key goal was to verify that our low-power STM32-based sensor device could receive, authenticate, and install updated neural-network weights while running in the field.
The test worked as planned: the device received the update, validated it, applied new weights, and continued live inference without interruption.
This confirms that our architecture for long-term autonomous monitoring is reliable even in harsh outdoor conditions.
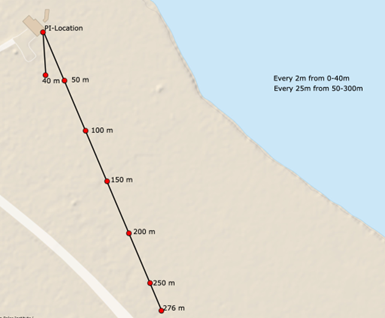
📡 𝟐𝟓𝟎 𝐦 𝐑𝐚𝐧𝐠𝐞 & 𝐒𝐩𝐞𝐞𝐝 𝐓𝐞𝐬𝐭
We then evaluated the communication link by walking the STM32 node away from the Raspberry Pi hotspot (with UNIS’s Geert Hensgens providing polar-bear safety).
The results were strong:
· Stable Wi-Fi connection up to 250 m
· Upload speed around 9.5 kbit/s, close to the 11.5 kbit/s theoretical maximum
These tests show that the system can reliably support remote neural-network updates over practical Arctic distances.
🚁 𝐃𝐫𝐨𝐧𝐞 𝐇𝐨𝐭𝐬𝐩𝐨𝐭 – 𝐋𝐞𝐬𝐬𝐨𝐧𝐬 𝐋𝐞𝐚𝐫𝐧𝐞𝐝
We also mounted the Raspberry Pi hotspot on the drone to test airborne communication.
Here, the usable range dropped to less than ~15 m, giving us important input for the next development steps.
Two likely causes emerged:
1️⃣ Antenna orientation – the current setup is optimized for horizontal, ground-level communication.
2️⃣ Power interference – powering the Raspberry Pi from the drone battery may introduce electrical noise; a powerbank was tested as an alternative but interfered with the drone’s compass.
The photos show some impressions from the range tests around the station and from the drone-mounted hotspot setup. Together, these results give us a clear direction for improvement: antenna optimization and better power isolation for UAV-based deployments.
📸 More insights from the Svalbard campaign coming soon!